Init 1
MQTT broker from scratch # 2 - Networking
posted on 2019 Mar 04Let’s continue from where we left, in the part 1
we defined and roughly modeled the MQTT v3.1.1 protocol and our src/mqtt.c
module has now all unpacking functions, we must add the remaining build helpers
and the packing functions to serialize packet for output.
As a side note we’re probably not going to write perfect and efficient
memory-wise code, but again, premature optimization is the root of all evil,
there will be plenty of time to improve the quality of the software with future
revisions.
Build, pack and send.
For now we only need CONNACK, SUBACK and PUBLISH packet builder, the
other ACK like packets can be created at the same manner with a single
function, that’s why the use of typedef for different ack codes.
union mqtt_header *mqtt_packet_header(unsigned char)will cover packet Fixed Header as well as PINGREQ, PINGRESP and DISCONNECT packetsstruct mqtt_ack *mqtt_packet_ack(unsigned char, unsigned short)will be used to build:PUBACKPUBRECPUBRELPUBCOMPUNSUBACK
The remaining packets will have a dedicated function. There’s probably better ways to reuse code and to model this but for now let’s stick to something that works, as previously stated time to optimize and refactor will come.
src/mqtt.c
/*
* MQTT packets building functions
*/
union mqtt_header *mqtt_packet_header(unsigned char byte) {
static union mqtt_header header;
header.byte = byte;
return &header;
}
struct mqtt_ack *mqtt_packet_ack(unsigned char byte, unsigned short pkt_id) {
static struct mqtt_ack ack;
ack.header.byte = byte;
ack.pkt_id = pkt_id;
return &ack;
}
struct mqtt_connack *mqtt_packet_connack(unsigned char byte,
unsigned char cflags,
unsigned char rc) {
static struct mqtt_connack connack;
connack.header.byte = byte;
connack.byte = cflags;
connack.rc = rc;
return &connack;
}
struct mqtt_suback *mqtt_packet_suback(unsigned char byte,
unsigned short pkt_id,
unsigned char *rcs,
unsigned short rcslen) {
struct mqtt_suback *suback = malloc(sizeof(*suback));
suback->header.byte = byte;
suback->pkt_id = pkt_id;
suback->rcslen = rcslen;
suback->rcs = malloc(rcslen);
memcpy(suback->rcs, rcs, rcslen);
return suback;
}
struct mqtt_publish *mqtt_packet_publish(unsigned char byte,
unsigned short pkt_id,
size_t topiclen,
unsigned char *topic,
size_t payloadlen,
unsigned char *payload) {
struct mqtt_publish *publish = malloc(sizeof(*publish));
publish->header.byte = byte;
publish->pkt_id = pkt_id;
publish->topiclen = topiclen;
publish->topic = topic;
publish->payloadlen = payloadlen;
publish->payload = payload;
return publish;
}
void mqtt_packet_release(union mqtt_packet *pkt, unsigned type) {
switch (type) {
case CONNECT:
free(pkt->connect.payload.client_id);
if (pkt->connect.bits.username == 1)
free(pkt->connect.payload.username);
if (pkt->connect.bits.password == 1)
free(pkt->connect.payload.password);
if (pkt->connect.bits.will == 1) {
free(pkt->connect.payload.will_message);
free(pkt->connect.payload.will_topic);
}
break;
case SUBSCRIBE:
case UNSUBSCRIBE:
for (unsigned i = 0; i < pkt->subscribe.tuples_len; i++)
free(pkt->subscribe.tuples[i].topic);
free(pkt->subscribe.tuples);
break;
case SUBACK:
free(pkt->suback.rcs);
break;
case PUBLISH:
free(pkt->publish.topic);
free(pkt->publish.payload);
break;
default:
break;
}
}
We move on to packing functions now, essentially they reflect unpacking ones, but acting in the opposite direction: We start from structs and unions to build a bytearray, ready to be written out over a socket.
A sure thing to underline, where you see functions returning pointer to static structure, this trick is OK with little structure that can be instantiated on the stack and on a single-thread context. Passing to a multithreaded environment this approach will surely bite us in the ass, cause every pointer to packet built like this will point to the same area of memory, causing conflicts and undefined results (different from dreadful undefined behaviour, the ultimate frightening beast of C/C++), so for future improvements it will probably better to refactor these parts to malloc some bytes for these structures.
Let’s map them like we’ve done before with the unpacking functions, an array where position reflects the packet type. To make the source a little more concise we could group pack and unpack handlers into a structure, so it’ll be possible to use a single array as they share the same positions.
src/mqtt.c
/*
* MQTT packets packing functions
*/
typedef unsigned char *mqtt_pack_handler(const union mqtt_packet *);
static mqtt_pack_handler *pack_handlers[13] = {
NULL,
NULL,
pack_mqtt_connack,
pack_mqtt_publish,
pack_mqtt_ack,
pack_mqtt_ack,
pack_mqtt_ack,
pack_mqtt_ack,
NULL,
pack_mqtt_suback,
NULL,
pack_mqtt_ack,
NULL
};
static unsigned char *pack_mqtt_header(const union mqtt_header *hdr) {
unsigned char *packed = malloc(MQTT_HEADER_LEN);
unsigned char *ptr = packed;
pack_u8(&ptr, hdr->byte);
/* Encode 0 length bytes, message like this have only a fixed header */
mqtt_encode_length(ptr, 0);
return packed;
}
static unsigned char *pack_mqtt_ack(const union mqtt_packet *pkt) {
unsigned char *packed = malloc(MQTT_ACK_LEN);
unsigned char *ptr = packed;
pack_u8(&ptr, pkt->ack.header.byte);
mqtt_encode_length(ptr, MQTT_HEADER_LEN);
ptr++;
pack_u16(&ptr, pkt->ack.pkt_id);
return packed;
}
static unsigned char *pack_mqtt_connack(const union mqtt_packet *pkt) {
unsigned char *packed = malloc(MQTT_ACK_LEN);
unsigned char *ptr = packed;
pack_u8(&ptr, pkt->connack.header.byte);
mqtt_encode_length(ptr, MQTT_HEADER_LEN);
ptr++;
pack_u8(&ptr, pkt->connack.byte);
pack_u8(&ptr, pkt->connack.rc);
return packed;
}
static unsigned char *pack_mqtt_suback(const union mqtt_packet *pkt) {
size_t pktlen = MQTT_HEADER_LEN + sizeof(uint16_t) + pkt->suback.rcslen;
unsigned char *packed = malloc(pktlen + 0);
unsigned char *ptr = packed;
pack_u8(&ptr, pkt->suback.header.byte);
size_t len = sizeof(uint16_t) + pkt->suback.rcslen;
int step = mqtt_encode_length(ptr, len);
ptr += step;
pack_u16(&ptr, pkt->suback.pkt_id);
for (int i = 0; i < pkt->suback.rcslen; i++)
pack_u8(&ptr, pkt->suback.rcs[i]);
return packed;
}
static unsigned char *pack_mqtt_publish(const union mqtt_packet *pkt) {
/*
* We must calculate the total length of the packet including header and
* length field of the fixed header part
*/
size_t pktlen = MQTT_HEADER_LEN + sizeof(uint16_t) +
pkt->publish.topiclen + pkt->publish.payloadlen;
// Total len of the packet excluding fixed header len
size_t len = 0L;
if (pkt->header.bits.qos > AT_MOST_ONCE)
pktlen += sizeof(uint16_t);
int remaininglen_offset = 0;
if ((pktlen - 1) > 0x200000)
remaininglen_offset = 3;
else if ((pktlen - 1) > 0x4000)
remaininglen_offset = 2;
else if ((pktlen - 1) > 0x80)
remaininglen_offset = 1;
pktlen += remaininglen_offset;
unsigned char *packed = malloc(pktlen);
unsigned char *ptr = packed;
pack_u8(&ptr, pkt->publish.header.byte);
// Total len of the packet excluding fixed header len
len += (pktlen - MQTT_HEADER_LEN - remaininglen_offset);
/*
* TODO handle case where step is > 1, e.g. when a message longer than 128
* bytes is published
*/
int step = mqtt_encode_length(ptr, len);
ptr += step;
// Topic len followed by topic name in bytes
pack_u16(&ptr, pkt->publish.topiclen);
pack_bytes(&ptr, pkt->publish.topic);
// Packet id
if (pkt->header.bits.qos > AT_MOST_ONCE)
pack_u16(&ptr, pkt->publish.pkt_id);
// Finally the payload, same way of topic, payload len -> payload
pack_bytes(&ptr, pkt->publish.payload);
return packed;
}
unsigned char *pack_mqtt_packet(const union mqtt_packet *pkt, unsigned type) {
if (type == PINGREQ || type == PINGRESP)
return pack_mqtt_header(&pkt->header);
return pack_handlers[type](pkt);
}
The server
The server we’re gonna create will be a single-threaded TCP server with multiplexed I/O by using epoll interface. Epoll is the last multiplexing mechanism after select and poll added with kernel 2.5.44, and the most performant with high number of connection, it’s counterpart for BSD and BSD-like (Mac OSX) systems is kqueue.
We’re gonna need some functions to manage our socket descriptors.
src/network.h
#ifndef NETWORK_H
#define NETWORK_H
#include <stdio.h>
#include <stdint.h>
#include <sys/types.h>
#include "util.h"
// Socket families
#define UNIX 0
#define INET 1
/* Set non-blocking socket */
int set_nonblocking(int);
/*
* Set TCP_NODELAY flag to true, disabling Nagle's algorithm, no more waiting
* for incoming packets on the buffer
*/
int set_tcp_nodelay(int);
/* Auxiliary function for creating epoll server */
int create_and_bind(const char *, const char *, int);
/*
* Create a non-blocking socket and make it listen on the specified address and
* port
*/
int make_listen(const char *, const char *, int);
/* Accept a connection and add it to the right epollfd */
int accept_connection(int);
Just some well-known helper functions to create and bind socket to listen for new connections and to set socket in non-blocking mode (a requirement to use epoll multiplexing at his best).
I don’t like to have to manage all streams of bytes incoming to and exiting from the host, this two functions never fail to appear in every C codebase regarding TCP communication:
ssize_t send_bytes(int, const unsigned char *, size_t)used to send all bytes out at once in while loop till no bytes left, by handlingEAGAINandEWOUDLBLOCKerror codesssize_t recv_bytes(int, unsigned char *, size_t), read an arbitrary number of bytes in a while loop, again handling correctlyEAGAINandEWOUDLBLOCKerror codes
src/network.h
/* I/O management functions */
/*
* Send all data in a loop, avoiding interruption based on the kernel buffer
* availability
*/
ssize_t send_bytes(int, const unsigned char *, size_t);
/*
* Receive (read) an arbitrary number of bytes from a file descriptor and
* store them in a buffer
*/
ssize_t recv_bytes(int, unsigned char *, size_t);
#endif
And the implementation on network.c. Omitting includes to spare some space.
src/network.c
#define _DEFAULT_SOURCE
// -- omitted includes
/* Set non-blocking socket */
int set_nonblocking(int fd) {
int flags, result;
flags = fcntl(fd, F_GETFL, 0);
if (flags == -1)
goto err;
result = fcntl(fd, F_SETFL, flags | O_NONBLOCK);
if (result == -1)
goto err;
return 0;
err:
perror("set_nonblocking");
return -1;
}
/* Disable Nagle's algorithm by setting TCP_NODELAY */
int set_tcp_nodelay(int fd) {
return setsockopt(fd, IPPROTO_TCP, TCP_NODELAY, &(int) {1}, sizeof(int));
}
static int create_and_bind_unix(const char *sockpath) {
struct sockaddr_un addr;
int fd;
if ((fd = socket(AF_UNIX, SOCK_STREAM, 0)) == -1) {
perror("socket error");
return -1;
}
memset(&addr, 0, sizeof(addr));
addr.sun_family = AF_UNIX;
strncpy(addr.sun_path, sockpath, sizeof(addr.sun_path) - 1);
unlink(sockpath);
if (bind(fd, (struct sockaddr*) &addr, sizeof(addr)) == -1) {
perror("bind error");
return -1;
}
return fd;
}
static int create_and_bind_tcp(const char *host, const char *port) {
struct addrinfo hints = {
.ai_family = AF_UNSPEC,
.ai_socktype = SOCK_STREAM,
.ai_flags = AI_PASSIVE
};
struct addrinfo *result, *rp;
int sfd;
if (getaddrinfo(host, port, &hints, &result) != 0) {
perror("getaddrinfo error");
return -1;
}
for (rp = result; rp != NULL; rp = rp->ai_next) {
sfd = socket(rp->ai_family, rp->ai_socktype, rp->ai_protocol);
if (sfd == -1) continue;
/* set SO_REUSEADDR so the socket will be reusable after process kill */
if (setsockopt(sfd, SOL_SOCKET, SO_REUSEADDR,
&(int) { 1 }, sizeof(int)) < 0)
perror("SO_REUSEADDR");
if ((bind(sfd, rp->ai_addr, rp->ai_addrlen)) == 0) {
/* Succesful bind */
break;
}
close(sfd);
}
if (rp == NULL) {
perror("Could not bind");
return -1;
}
freeaddrinfo(result);
return sfd;
}
int create_and_bind(const char *host, const char *port, int socket_family) {
int fd;
if (socket_family == UNIX)
fd = create_and_bind_unix(host);
else
fd = create_and_bind_tcp(host, port);
return fd;
}
/*
* Create a non-blocking socket and make it listen on the specfied address and
* port
*/
int make_listen(const char *host, const char *port, int socket_family) {
int sfd;
if ((sfd = create_and_bind(host, port, socket_family)) == -1)
abort();
if ((set_nonblocking(sfd)) == -1)
abort();
// Set TCP_NODELAY only for TCP sockets
if (socket_family == INET)
set_tcp_nodelay(sfd);
if ((listen(sfd, conf->tcp_backlog)) == -1) {
perror("listen");
abort();
}
return sfd;
}
int accept_connection(int serversock) {
int clientsock;
struct sockaddr_in addr;
socklen_t addrlen = sizeof(addr);
if ((clientsock = accept(serversock,
(struct sockaddr *) &addr, &addrlen)) < 0)
return -1;
set_nonblocking(clientsock);
// Set TCP_NODELAY only for TCP sockets
if (conf->socket_family == INET)
set_tcp_nodelay(clientsock);
char ip_buff[INET_ADDRSTRLEN + 1];
if (inet_ntop(AF_INET, &addr.sin_addr,
ip_buff, sizeof(ip_buff)) == NULL) {
close(clientsock);
return -1;
}
return clientsock;
}
/* Send all bytes contained in buf, updating sent bytes counter */
ssize_t send_bytes(int fd, const unsigned char *buf, size_t len) {
size_t total = 0;
size_t bytesleft = len;
ssize_t n = 0;
while (total < len) {
n = send(fd, buf + total, bytesleft, MSG_NOSIGNAL);
if (n == -1) {
if (errno == EAGAIN || errno == EWOULDBLOCK)
break;
else
goto err;
}
total += n;
bytesleft -= n;
}
return total;
err:
fprintf(stderr, "send(2) - error sending data: %s", strerror(errno));
return -1;
}
/*
* Receive a given number of bytes on the descriptor fd, storing the stream of
* data into a 2 Mb capped buffer
*/
ssize_t recv_bytes(int fd, unsigned char *buf, size_t bufsize) {
ssize_t n = 0;
ssize_t total = 0;
while (total < (ssize_t) bufsize) {
if ((n = recv(fd, buf, bufsize - total, 0)) < 0) {
if (errno == EAGAIN || errno == EWOULDBLOCK) {
break;
} else
goto err;
}
if (n == 0)
return 0;
buf += n;
total += n;
}
return total;
err:
fprintf(stderr, "recv(2) - error reading data: %s", strerror(errno));
return -1;
}
Basic closure system
To make more easy and comfortable the usage of the epoll API,with this project requiring not so complex operations to handle, I built a simple abstraction on top of the multiplexing interface to make it possible to register callback functions that will be executed on events happening.
There’re a lot of examples of using epoll on the web, the majority of them just
show the basic usage, where we register a set of socket descriptors and start a
loop to monitor them for incoming events, each time a descriptor is ready for
reading or writing, a function is called to make use of them, which is surely a
neat implementation, but a bit constrained. The solution I decided to use,
leverage the union epoll_data:
typedef union epoll_data {
void *ptr;
int fd;
uint32_t u32;
uint64_t u64;
} epoll_data_t;
As shown, there is a void *, an int commonly used to store the descriptor we
were talking about and two integer of different size. I preferred to use a
custom structure with the descriptor inside and some other context fields,
specifically a function pointer and its optional arguments. We’ll register a
pointer to this structure passing it to the pointer void *ptr. This way,
every time an event occur, we’ll have access to the very same structure pointer
we registered, including the file descriptor associated.
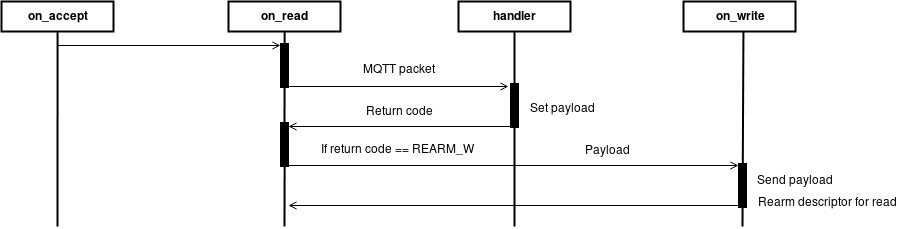
There’s two types of callback which can be defined, the common ones, that will be triggered with events and the periodic ones, that will be executed automatically every tick of time interval defined. So let’s wrap the epoll loop into a dedicated structure, we’ll do the same for the callback functions, defining a structure with some fields useful for the execution of the callback.
Sequential diagram, for each cycle of epoll_wait on incoming events
We’re going to declare two structures and a function pointer:
- struct evloop, a wrapper around the epoll instance, encapsulating all needed properties
- struct closure which abstract a callback and a sort of context with arguments and a serialized payload of the results
- void callback(struct evloop *, void *), the heart of the closure, it’s the prototype of the function we’re gonna pass as callback.
Plus, we’ll declare and implement on the .c file some creation, delete and managing functions.
src/network.h
/* Event loop wrapper structure, define an EPOLL loop and his status. The
* EPOLL instance use EPOLLONESHOT for each event and must be re-armed
* manually, in order to allow future uses on a multithreaded architecture.
*/
struct evloop {
int epollfd;
int max_events;
int timeout;
int status;
struct epoll_event *events;
/* Dynamic array of periodic tasks, a pair descriptor - closure */
int periodic_maxsize;
int periodic_nr;
struct {
int timerfd;
struct closure *closure;
} **periodic_tasks;
} evloop;
typedef void callback(struct evloop *, void *);
/*
* Callback object, represents a callback function with an associated
* descriptor if needed, args is a void pointer which can be a structure
* pointing to callback parameters and closure_id is a UUID for the closure
* itself.
* The last two fields are payload, a serialized version of the result of
* a callback, ready to be sent through wire and a function pointer to the
* callback function to execute.
*/
struct closure {
int fd;
void *obj;
void *args;
char closure_id[UUID_LEN];
struct bytestring *payload;
callback *call;
};
struct evloop *evloop_create(int, int);
void evloop_init(struct evloop *, int, int);
void evloop_free(struct evloop *);
/*
* Blocks in a while(1) loop awaiting for events to be raised on monitored
* file descriptors and executing the paired callback previously registered
*/
int evloop_wait(struct evloop *);
/*
* Register a closure with a function to be executed every time the
* paired descriptor is re-armed.
*/
void evloop_add_callback(struct evloop *, struct closure *);
/*
* Register a periodic closure with a function to be executed every
* defined interval of time.
*/
void evloop_add_periodic_task(struct evloop *,
int,
unsigned long long,
struct closure *);
/*
* Unregister a closure by removing the associated descriptor from the
* EPOLL loop
*/
int evloop_del_callback(struct evloop *, struct closure *);
/*
* Rearm the file descriptor associated with a closure for read action,
* making the event loop to monitor the callback for reading events
*/
int evloop_rearm_callback_read(struct evloop *, struct closure *);
/*
* Rearm the file descriptor associated with a closure for write action,
* making the event loop to monitor the callback for writing events
*/
int evloop_rearm_callback_write(struct evloop *, struct closure *);
/* Epoll management functions */
int epoll_add(int, int, int, void *);
/*
* Modify an epoll-monitored descriptor, automatically set `EPOLLONESHOT` in
* addition to the other flags, which can be `EPOLLIN` for read and EPOLLOUT for
* write
*/
int epoll_mod(int, int, int, void *);
/*
* Remove a descriptor from an epoll descriptor, making it no-longer monitored
* for events
*/
int epoll_del(int, int);
After some declarations on the header for network utility we can move on to the implementation of the functions.
We start with simple creation, init and deletion of the previously declared
structure evloop, consisting in a file descriptor for the epoll loop, a
number of events to monitor, a timeout in milliseconds that defines the time
we’ll block the loop, the status of the loop (will probably contain error codes
for faulting cases) and finally a dynamic array of periodic tasks that will be
executed.
src/network.c
/******************************
* EPOLL APIS *
******************************/
#define EVLOOP_INITIAL_SIZE 4
struct evloop *evloop_create(int max_events, int timeout) {
struct evloop *loop = malloc(sizeof(*loop));
evloop_init(loop, max_events, timeout);
return loop;
}
void evloop_init(struct evloop *loop, int max_events, int timeout) {
loop->max_events = max_events;
loop->events = malloc(sizeof(struct epoll_event) * max_events);
loop->epollfd = epoll_create1(0);
loop->timeout = timeout;
loop->periodic_maxsize = EVLOOP_INITIAL_SIZE;
loop->periodic_nr = 0;
loop->periodic_tasks =
malloc(EVLOOP_INITIAL_SIZE * sizeof(*loop->periodic_tasks));
loop->status = 0;
}
void evloop_free(struct evloop *loop) {
free(loop->events);
for (int i = 0; i < loop->periodic_nr; i++)
free(loop->periodic_tasks[i]);
free(loop->periodic_tasks);
free(loop);
}
Now, epoll API is extensively documentated on its manpage, but we’ll need 3
functions to add, remove and modify monitored descriptors and trigger events,
using EPOLLET flag, in order to use epoll on edge-triggered behaviour (the
default one is Level-triggered, see
manpage and avoid in a
future multithreaded implementation to wake up all threads at once every time
a new event is triggered and one or more descriptor are ready to read or write
(thundering herd problem), but this is another story, also this explained
clearly on the man page.
src/network.c
int epoll_add(int efd, int fd, int evs, void *data) {
struct epoll_event ev;
ev.data.fd = fd;
// Being ev.data a union, in case of data != NULL, fd will be set to random
if (data)
ev.data.ptr = data;
ev.events = evs | EPOLLET | EPOLLONESHOT;
return epoll_ctl(efd, EPOLL_CTL_ADD, fd, &ev);
}
int epoll_mod(int efd, int fd, int evs, void *data) {
struct epoll_event ev;
ev.data.fd = fd;
// Being ev.data a union, in case of data != NULL, fd will be set to random
if (data)
ev.data.ptr = data;
ev.events = evs | EPOLLET | EPOLLONESHOT;
return epoll_ctl(efd, EPOLL_CTL_MOD, fd, &ev);
}
int epoll_del(int efd, int fd) {
return epoll_ctl(efd, EPOLL_CTL_DEL, fd, NULL);
}
Two things to be noted:
-
First, as previously stated, the main structure
epoll_eventcontains aunion epoll_datainside, which accept a file descriptor or avoid *pointer. We’ll use the latter, this way we’ll be able to pass around more informations and use our custom closure, the file descriptor will be stored inside the structure pointed. -
Second, our add and mod functions accepts as third parameters a set of events, mostly
EPOLLINorEPOLLOUT, but they addEPOLLONESHOTto them, in other words after an event if fired for a descriptor, that descriptor will be disabled, until manually rearmed.
This way every time an event is triggered, the descriptor must be manually rearmed for read or write events.This is done to maintain some degree of control on low level events triggering and to left an open door in case of future multithreaded implementation, this great article explains wonderfully the advantages (or the broken parts) of the epoll and why it’s better to useEPOLLONESHOTflag.
We move forward now to implement the basic closure system and the wait loop for read and write events, as well as periodic timed callbacks.
src/network.c
void evloop_add_callback(struct evloop *loop, struct closure *cb) {
if (epoll_add(loop->epollfd, cb->fd, EPOLLIN, cb) < 0)
perror("Epoll register callback: ");
}
void evloop_add_periodic_task(struct evloop *loop,
int seconds,
unsigned long long ns,
struct closure *cb) {
struct itimerspec timervalue;
int timerfd = timerfd_create(CLOCK_MONOTONIC, 0);
memset(&timervalue, 0x00, sizeof(timervalue));
// Set initial expire time and periodic interval
timervalue.it_value.tv_sec = seconds;
timervalue.it_value.tv_nsec = ns;
timervalue.it_interval.tv_sec = seconds;
timervalue.it_interval.tv_nsec = ns;
if (timerfd_settime(timerfd, 0, &timervalue, NULL) < 0) {
perror("timerfd_settime");
return;
}
// Add the timer to the event loop
struct epoll_event ev;
ev.data.fd = timerfd;
ev.events = EPOLLIN;
if (epoll_ctl(loop->epollfd, EPOLL_CTL_ADD, timerfd, &ev) < 0) {
perror("epoll_ctl(2): EPOLLIN");
return;
}
/* Store it into the event loop */
if (loop->periodic_nr + 1 > loop->periodic_maxsize) {
loop->periodic_maxsize *= 2;
loop->periodic_tasks =
realloc(loop->periodic_tasks,
loop->periodic_maxsize * sizeof(*loop->periodic_tasks));
}
loop->periodic_tasks[loop->periodic_nr] =
malloc(sizeof(*loop->periodic_tasks[loop->periodic_nr]));
loop->periodic_tasks[loop->periodic_nr]->closure = cb;
loop->periodic_tasks[loop->periodic_nr]->timerfd = timerfd;
loop->periodic_nr++;
}
int evloop_wait(struct evloop *el) {
int rc = 0;
int events = 0;
long int timer = 0L;
int periodic_done = 0;
while (1) {
events = epoll_wait(el->epollfd, el->events,
el->max_events, el->timeout);
if (events < 0) {
/* Signals to all threads. Ignore it for now */
if (errno == EINTR)
continue;
/* Error occured, break the loop */
rc = -1;
el->status = errno;
break;
}
for (int i = 0; i < events; i++) {
/* Check for errors */
if ((el->events[i].events & EPOLLERR) ||
(el->events[i].events & EPOLLHUP) ||
(!(el->events[i].events & EPOLLIN) &&
!(el->events[i].events & EPOLLOUT))) {
/* An error has occured on this fd, or the socket is not
ready for reading, closing connection */
perror ("epoll_wait(2)");
shutdown(el->events[i].data.fd, 0);
close(el->events[i].data.fd);
el->status = errno;
continue;
}
struct closure *closure = el->events[i].data.ptr;
periodic_done = 0;
for (int i = 0; i < el->periodic_nr && periodic_done == 0; i++) {
if (el->events[i].data.fd == el->periodic_tasks[i]->timerfd) {
struct closure *c = el->periodic_tasks[i]->closure;
(void) read(el->events[i].data.fd, &timer, 8);
c->call(el, c->args);
periodic_done = 1;
}
}
if (periodic_done == 1)
continue;
/* No error events, proceed to run callback */
closure->call(el, closure->args);
}
}
return rc;
}
int evloop_rearm_callback_read(struct evloop *el, struct closure *cb) {
return epoll_mod(el->epollfd, cb->fd, EPOLLIN, cb);
}
int evloop_rearm_callback_write(struct evloop *el, struct closure *cb) {
return epoll_mod(el->epollfd, cb->fd, EPOLLOUT, cb);
}
int evloop_del_callback(struct evloop *el, struct closure *cb) {
return epoll_del(el->epollfd, cb->fd);
}
Of all defined functions, evloop_wait is the most interesting, start an
epoll_wait loop and after error check, it proceeds to apply the callback
registered with that fd, differentiating from periodic task auto-triggered on
time-basis or normal callback for read/write events.
The codebase is growing, we have added another module, currently it should look like this:
sol/
├── src/
│ ├── mqtt.h
| ├── mqtt.c
│ ├── network.h
│ ├── network.c
│ ├── pack.h
│ └── pack.c
├── CHANGELOG
├── CMakeLists.txt
├── COPYING
└── README.md
The part 3 awaits for implementation of the server module.